Actor-Critic算法是一种结合策略梯度policy gradient和时序差分学习TD learning的强化学习方法。其中actor(演员)是指策略函数π(s, a),即学习一个策略来得到尽量高的回报;critic(评论员)是指值函数Vϕ(s),对当前策略的值函数进行估计,即评估actor的好坏。然后交替学习至收敛。借助于值函数,actor-critic 算法可以进行单步更新参数,不需要等到回合结合才进行更新。
数学推导
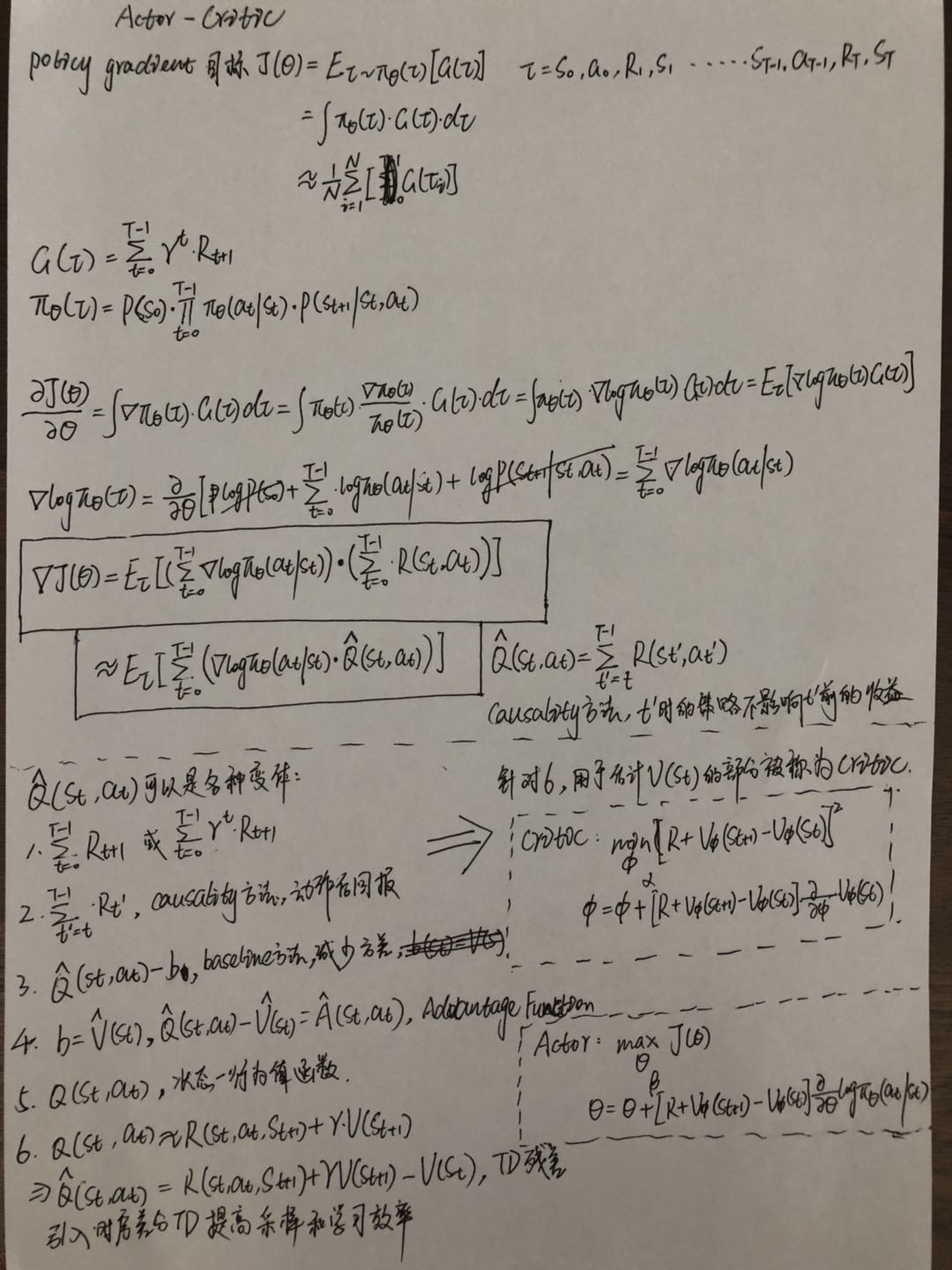
伪代码示例
1
2
3
4
5
6
7
8
9
10
| class Critic(object):
def __init__(self, sess, n_features, lr=0.01):
"""
Critic网络结构,输出V(s),略
"""
with tf.variable_scope('squared_TD_error'):
self.td_error = self.r + GAMMA * self.v_next - self.v
self.loss = tf.square(self.td_error)
with tf.variable_scope('train'):
self.train_op = tf.train.AdamOptimizer(lr).minimize(self.loss)
|
1
2
3
4
5
6
7
8
9
10
11
12
| class Actor(object):
def __init__(self, sess, n_features, n_actions, lr=0.001):
"""
Actor网络结构,输出p(a|s),略
"""
with tf.variable_scope('exp_v'):
log_prob = tf.log(self.acts_prob[0, self.a])
self.exp_v = tf.reduce_mean(log_prob * self.td_error)
with tf.variable_scope('train'):
self.train_op = tf.train.AdamOptimizer(lr).minimize(-self.exp_v)
def choose_action(self, s):
pass
|
应用场景
离线没有足够label数据时,无法进行监督学习,可考虑通过线上try-and-error,进行Actor-Critic强化学习,Reward恒正也ok。

